Exploring Arduino I2C Communication

Introduction
Inter-Integrated Circuit (I2C) communication stands as a cornerstone protocol in embedded systems, facilitating efficient data exchange between microcontrollers and peripheral devices. This article presents an in-depth exploration of I2C implementation using Arduino platforms, focusing on the theoretical underpinnings, practical implementation challenges, and potential applications in complex embedded systems.
Theoretical Foundation
I2C, developed by Philips Semiconductors (now NXP Semiconductors), is a multi-master, multi-slave, packet-switched, single-ended, serial communication bus. Its design principles revolve around simplicity and efficiency, utilizing only two bidirectional open-drain lines: Serial Data Line (SDA) and Serial Clock Line (SCL).
The I2C protocol operates on a master-slave architecture, where one or more master devices initiate and control the communication with slave devices. Each slave device on the bus is assigned a unique 7-bit or 10-bit address. Special bus conditions signify the beginning and end of a transmission, ensuring reliable data transfer between devices. The protocol also allows slaves to hold the clock line low to delay data transfer and accommodate slower devices.
The basic I2C transaction structure can be represented as the following timing diagram:
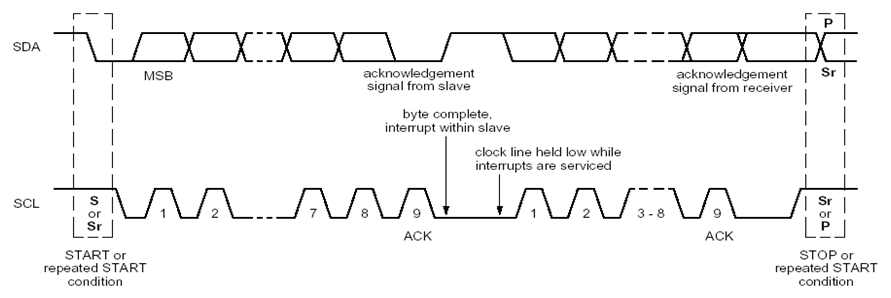
This diagram illustrates the key components and timing of I2C communication, including the SDA and SCL lines, START and STOP conditions, data bits, acknowledgment, clock stretching, and repeated START conditions.
Implementation on Arduino Platforms
Arduino's Wire library abstracts much of the low-level I2C implementation, providing a high-level interface for I2C communication. However, understanding the underlying mechanics is essential for optimal performance and troubleshooting.
Master Device Implementation
The master device, in this case an Arduino Nano, initiates and controls the I2C communication.
#include <Wire.h>
const int SLAVE_ADDRESS = 9;
const int MAX_VALUE = 5;
void setup() {
Wire.begin(); // Initialize I2C as master
Serial.begin(9600);
}
void loop() {
for (int i = 0; i <= MAX_VALUE; i++) {
Wire.beginTransmission(SLAVE_ADDRESS);
Wire.write(i);
byte error = Wire.endTransmission();
if (error == 0) {
Serial.print("Sent value: ");
Serial.println(i);
} else {
Serial.print("Error code: ");
Serial.println(error);
}
delay(1000); // Wait for 1 second before next transmission
}
}
This implementation demonstrates key I2C master operations, including initialization, starting a transmission, writing data, and ending the transmission while checking for errors.
Slave Device Implementation
The slave device, an Arduino Uno R3 in our setup, listens for I2C communications and responds accordingly. Here's an expanded version of the slave code:
#include <Wire.h>
const int LED_PIN = 13;
const int SLAVE_ADDRESS = 9;
volatile byte receivedValue = 0;
void setup() {
pinMode(LED_PIN, OUTPUT);
Wire.begin(SLAVE_ADDRESS);
Wire.onReceive(receiveEvent);
Serial.begin(9600);
}
void receiveEvent(int byteCount) {
while (Wire.available()) {
receivedValue = Wire.read();
Serial.print("Received value: ");
Serial.println(receivedValue);
}
}
void loop() {
switch (receivedValue) {
case '0':
blinkLED(200);
break;
case '3':
blinkLED(400);
break;
default:
digitalWrite(LED_PIN, LOW);
}
}
void blinkLED(int duration) {
digitalWrite(LED_PIN, HIGH);
delay(duration);
digitalWrite(LED_PIN, LOW);
delay(duration);
}
This implementation demonstrates slave address assignment during initialization, the use of interrupt-driven receive event handling, and data processing based on received values.
Common Challenges and Troubleshooting Techniques
While I2C offers numerous advantages, it's not without its challenges. Bus contention can occur when multiple masters attempt to initiate communication simultaneously. This issue can be mitigated through careful timing design and the implementation of collision detection and arbitration mechanisms. Clock stretching, a feature allowing slaves to temporarily pause communication by holding the SCL line low, can sometimes lead to deadlock situations if not properly managed. Developers must ensure that both master and slave devices correctly handle clock stretching scenarios to maintain reliable communication.
Dealing with multiple slaves on the same bus presents its own set of challenges. Address conflicts can arise if two devices share the same I2C address. To resolve this, some devices offer configurable addresses through hardware pins or software commands. In scenarios where address conflicts cannot be resolved, implementing a multiplexing solution using additional GPIO pins to selectively enable specific devices is an effective workaround.
Another common issue in I2C communication is signal integrity degradation due to long bus lines or excessive capacitive loading. This can be addressed by using lower bus speeds, implementing bus buffers, or using differential I2C for improved noise immunity in harsh environments. Proper pull-up resistor selection is crucial for maintaining signal integrity and ensuring reliable communication across various operating conditions.
Performance Aspects and Optimization
I2C performance is primarily dictated by its bus speed limitations. Standard I2C operates at 100 kHz, while Fast-mode I2C can reach speeds of 400 kHz. More recent variants like Fast-mode Plus (1 MHz) and High-speed mode (3.4 MHz) offer significantly higher data transfer rates, though compatibility with existing devices may be limited.
Several factors affect I2C data transfer rates in practice. Bus capacitance, influenced by trace length and the number of connected devices, can limit the maximum achievable speed. Pull-up resistor values play a crucial role in determining rise times and overall bus performance. Selecting the optimal pull-up resistance involves balancing fast rise times with power consumption and signal integrity considerations.
In resource-constrained environments, several techniques can be employed to optimize I2C performance. Minimizing data packet size and utilizing burst transfers can significantly reduce communication overhead. Implementing a caching mechanism for frequently accessed data can reduce the number of I2C transactions required. In multi-master systems, intelligent bus scheduling and arbitration schemes can maximize bus utilization and minimize conflicts.
Comparison with Other Communication Protocols
While I2C excels in many applications, understanding its strengths and weaknesses relative to other protocols is crucial for selecting the most appropriate communication method for a given project. SPI (Serial Peripheral Interface) offers higher speed and full-duplex communication but requires more signal lines and becomes unwieldy with a large number of devices. UART (Universal Asynchronous Receiver/Transmitter) provides simple point-to-point communication but lacks the addressing and multi-device capabilities of I2C.
I2C shines in scenarios requiring multiple devices on a shared bus with moderate speed requirements. Its two-wire design makes it ideal for applications with limited I/O pins. However, for high-speed data transfer or when dealing with a small number of peripherals, SPI might be preferable. UART remains a popular choice for its simplicity in point-to-point communications, especially when standard baud rates are sufficient.
Choosing between these protocols often involves trade-offs between speed, pin count, complexity, and power consumption. I2C's balance of features makes it particularly well-suited for sensor networks, EEPROM interfacing, and communication between subsystems in complex embedded designs.
Conclusion
This exploration of I2C communication using Arduino platforms provides a foundation for understanding and implementing embedded systems protocols. By delving into the practical implementations and the workings of the Wire library, we've unveiled the power and flexibility of I2C in facilitating inter-device communication. As the IoT landscape continues to evolve, mastering such fundamental protocols becomes increasingly crucial for developing sophisticated, interconnected embedded systems.
The journey from simple LED blinking to understanding the intricacies of I2C communication exemplifies the depth of knowledge required for modern embedded systems development. As we look to the future, the principles explored here will undoubtedly play a pivotal role in shaping the next generation of intelligent, communicating devices and opening up new possibilities for innovation in fields ranging from consumer electronics to industrial automation.